Der RCX unterstützt aktive und passive Sensoren. Was heißt das?
Passive Sensoren
Bei passiven Sensoren wird einfach nur der Stromfluss durch
einen veränderlichen Widerstand gemessen.
Beispiele:
- Berührung (Taster / Bumper)
- Drehwinkel (Potentiometer)
- Licht / Helligkeit (LDR)
- Temperatur (NTC / PTC)
In Martin's Bastelstube, Teil II
findet ihr ein Beispiel, wie man mehrere Taster oder Bumper
über einen einzigen passiven Sensoreingang abfragen kann.
Aktive Sensoren
Aktive Sensoren enthalten zusätzliche Elektronik,
die den reinen Sensormesswert vorverarbeitet und verstärkt.
Weil nur zwei Leitungen vom RCX zum Sensor gehen, muss der
Sensor über diese zwei Leitungen mit Strom versorgt werden
und gleichzeitig muss der Sensorwert ausgelesen werden.
Der RCX löst dieses Problem, indem er über eine bestimmte
Zeit den Versorgungsstrom für den Sensor ausgibt, dann
über eine kurze Zeit abschaltet und währenddessen den
Sensorwert abfragt.
Der angeschlossene Sensor muss also die Versorgungsspannung
speichern, während der Sensorwert abgefragt wird. Und
der Ausgang muss elektrisch robust genug sein, dass er keinen
Schaden nimmt in den Perioden, wenn die Versorgung eingespeist
wird.
Das Letztere gilt übrigens auch für passive Sensoren
– sie sollten immer mindestens 500 Ohm haben,
beispielsweise durch einen in Reihe geschalteten Widerstand.
Sonst riskiert man Beschädigungen am Sensor oder am RCX,
wenn man aus Versehen die Sensoren falsch angeschlossen oder
falsch programmiert hat.
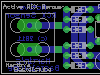
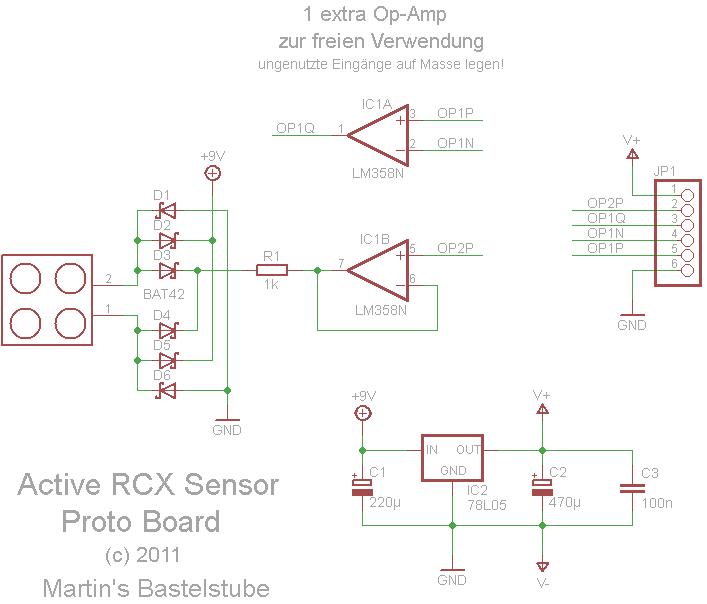
Meine Schaltung
besteht zuerst aus einem Brückengleichrichter – man weiß
ja nicht, wie herum das Kabel angeschlossen wurde. Es ist besser, für
den Gleichrichter Schottky-Dioden (BAT42 oder ähnlich) zu verwenden,
damit möglichst wenig Spannung im Gleichrichter verloren geht.
Dann kommt ein dicker Elektrolytkondensator (Elko), der die
Versorgungsspannung speichert. Diese wird dann von einem Spannungsregler
78L05 auf glatte 5 Volt geregelt, mit denen die Elektronik gespeist wird.
 Ein doppelter Operationsverstärker (OP) erlaubt
präzise Vorverarbeitung des elektrischen Signals
vom Sensor. Ein OP ist bereits als Ausgangsstufe fest
verdrahtet, der andere steht für eure eigenen
Zwecke frei zur Verfügung. Falls ihr ihn nicht
braucht, solltet ihr beide Eingänge auf
Masse (0 V) ziehen.
Der Ausgang hat einen Reihenwiderstand von 1 kOhm und
einen halben Gleichrichter zum RCX-Stecker, weil auch
hier wieder nicht bekannt ist, wie herum das Kabel
am RCX angeschlossen ist.
Ein doppelter Operationsverstärker (OP) erlaubt
präzise Vorverarbeitung des elektrischen Signals
vom Sensor. Ein OP ist bereits als Ausgangsstufe fest
verdrahtet, der andere steht für eure eigenen
Zwecke frei zur Verfügung. Falls ihr ihn nicht
braucht, solltet ihr beide Eingänge auf
Masse (0 V) ziehen.
Der Ausgang hat einen Reihenwiderstand von 1 kOhm und
einen halben Gleichrichter zum RCX-Stecker, weil auch
hier wieder nicht bekannt ist, wie herum das Kabel
am RCX angeschlossen ist.
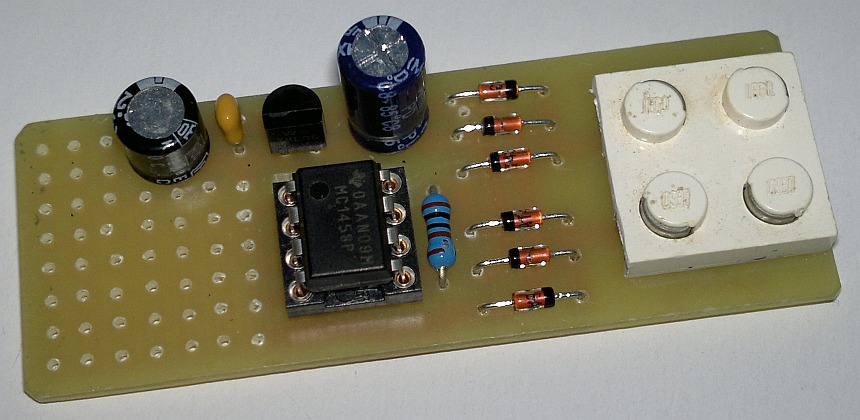
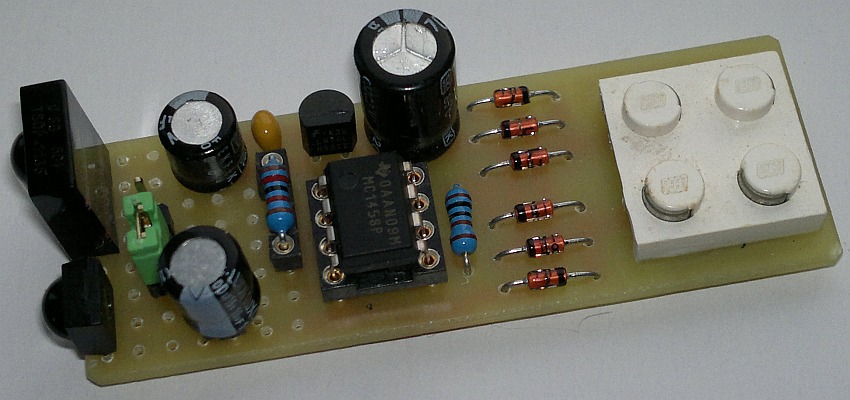
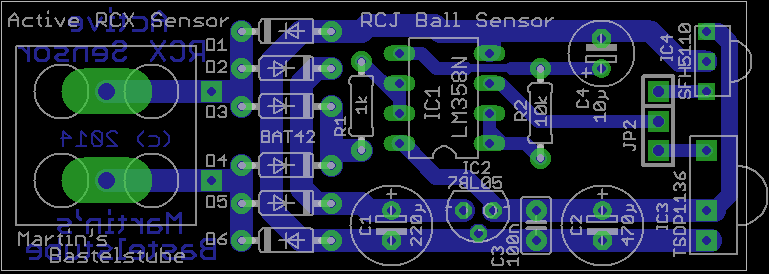
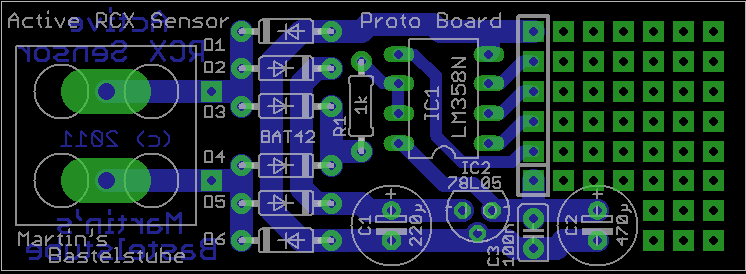
 Eine Lochrasterfläche lässt euch etwas Freiraum
für den Sensor und seine Beschaltung ... rechts seht
ihr meinen eigenen Aufbau mit zwei verschiedenen
Ballsensoren für gepulstes Infrarotlicht. Das Fehlen
von modernen Ballsensoren für RCX ist meiner Meinung
nach der Hauptgrund dafür, dass man heutzutage kaum
noch mit RCX angetriebene Roboter auf den RoboCup Junior
Fußball-Wettbewerben finden kann.
Der abgebildete Ballsensor ist auf der Lochrasterfläche
aufgebaut, aber ich habe auch eine komplette
Platine
für den Ballsensor entworfen.
Eine Lochrasterfläche lässt euch etwas Freiraum
für den Sensor und seine Beschaltung ... rechts seht
ihr meinen eigenen Aufbau mit zwei verschiedenen
Ballsensoren für gepulstes Infrarotlicht. Das Fehlen
von modernen Ballsensoren für RCX ist meiner Meinung
nach der Hauptgrund dafür, dass man heutzutage kaum
noch mit RCX angetriebene Roboter auf den RoboCup Junior
Fußball-Wettbewerben finden kann.
Der abgebildete Ballsensor ist auf der Lochrasterfläche
aufgebaut, aber ich habe auch eine komplette
Platine
für den Ballsensor entworfen.
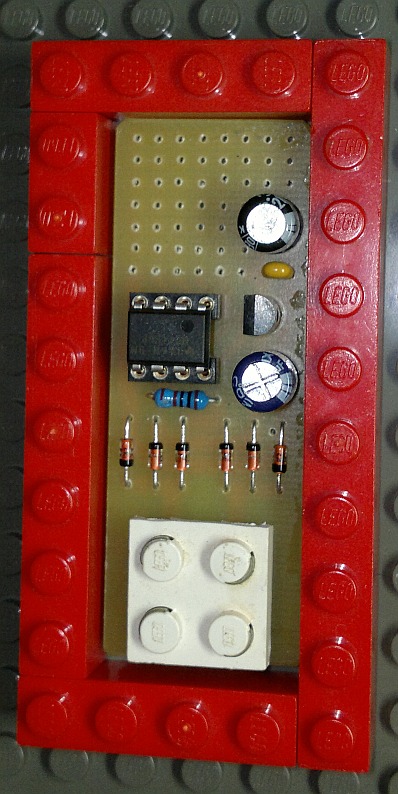
 Die Platine belegt eine Grundfläche von etwas weniger als
3 x 8 Noppen im LEGO-Raster – damit lässt sie sich
leicht umbauen für besseren mechanischen Halt auf dem Roboter.
Vielleicht baue ich noch eine Variante mit SMD-Bauteilen, die dann
sogar auf einer Breite von 2 Noppen Platz findet.
Bitte meldet euch bei mir, wenn ihr Bedarf für so eine
verkleinerte Sensorplatine habt.
Wie sieht denn das Experimentierboard für aktive RCX-Sensoren überhaupt aus?
Und wie sieht der aktive Ballsensor für RCX aus?
Tschüß, euer Martin S.
Die Platine belegt eine Grundfläche von etwas weniger als
3 x 8 Noppen im LEGO-Raster – damit lässt sie sich
leicht umbauen für besseren mechanischen Halt auf dem Roboter.
Vielleicht baue ich noch eine Variante mit SMD-Bauteilen, die dann
sogar auf einer Breite von 2 Noppen Platz findet.
Bitte meldet euch bei mir, wenn ihr Bedarf für so eine
verkleinerte Sensorplatine habt.
Wie sieht denn das Experimentierboard für aktive RCX-Sensoren überhaupt aus?
Und wie sieht der aktive Ballsensor für RCX aus?
Tschüß, euer Martin S.
|
E-mail:
Diese E-Mail-Adresse ist vor Spambots geschützt! Zur Anzeige muss JavaScript eingeschaltet sein!


{kind=link}
{kind=link}
{kind=link}
{kind=link}