Das Power-Board ist ein Steuerrechner für Roboter mit
reichlich Ein-/Ausgängen und starken Motortreibern.
Ich habe verschiedene Versionen entworfen, die sich hauptsächlich
durch ihre Rechnerkerne unterscheiden. Der Leistungsteil und die
Motortreiber sind in allen Versionen gleich.
Weil auf dem Power-Board nicht genug Platz für ein Display und
Bedientasten blieb, habe ich ein Display-Board gebaut, das huckepack
in einer zweiten Ebene auf das Power-Board gesetzt wird.
Alle Power-Boards haben gemeinsam:
- 4 Motorausgänge mit je 2.8 Ampère Motorstrom
- 1 zusätzlichen geschalteten Ausgang mit maximal 6 Ampère
(z.B. für Zugmagnete)
- Alle Analog-Eingänge auf einem Wannenstecker, auf dem
Flachbandkabel abwechselnd mit Masse untereinander abgeschirmt
- Alle Digital-Ein/Ausgänge auf einem Wannenstecker, zusammen
mit Betriebsspannung
- Verpolungsschutz für Stromversorgung
- Hauptschalter für Stromversorgung
(Akku kann im ausgeschalteten Zustand geladen werden
- Getrennte PolySwitch-Sicherungen für Steuerelektronik und
Leistungsteil
- Wannenstecker für Anschluss eines separaten Display-Boards
- I2C-Stecker umschaltbar für 5V oder Akkuspannung
- Akkuspannung kann auf einem Analogkanal gemessen werden
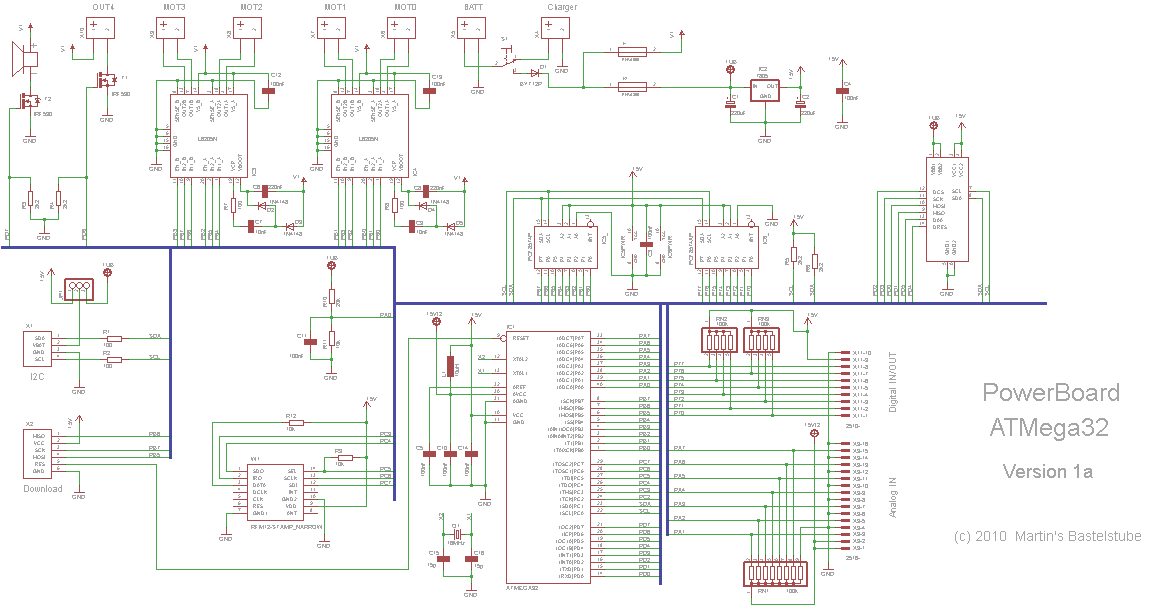
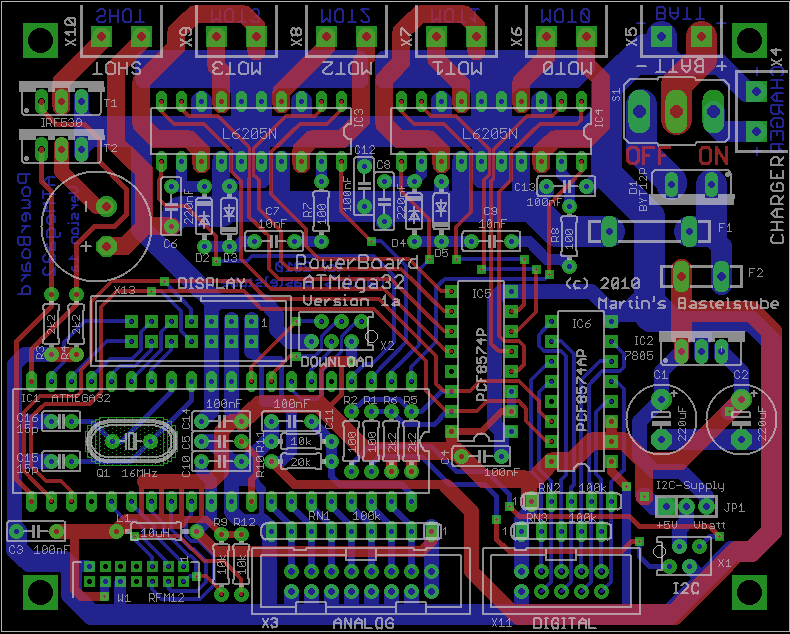
Power-Board mit ATMega32, Version 1:
 Dieses Power-Board rechnet mit dem ATMega32, den wir vom Bobby- oder Gold-Board kennen.
Allerdings habe ich dem Controller einen Quarz spendiert, damit er wenigstens mit den
vollen 16 MHz rechnen kann (das Bobby-Board arbeitet nur mit 8 MHz).
Der ATMega32 hat zu wenige Anschlusspins für alles, was auf dem Power-Board
zu schalten und zu kontrollieren ist. Deshalb habe ich auf dem Power-Board und auf
dem Display-Board je zwei I2C-Expander PCF8574(A) eingesetzt, die langsamere
Ein-/Ausgabeoperationen übernehmen. Zusätzlich ist auf dem Display-Board
Platz für ein EEPROM, wo ihr große Datenmengen (z.B. Bilder für das
graphische Display) ablegen könnt.
Dieses Power-Board rechnet mit dem ATMega32, den wir vom Bobby- oder Gold-Board kennen.
Allerdings habe ich dem Controller einen Quarz spendiert, damit er wenigstens mit den
vollen 16 MHz rechnen kann (das Bobby-Board arbeitet nur mit 8 MHz).
Der ATMega32 hat zu wenige Anschlusspins für alles, was auf dem Power-Board
zu schalten und zu kontrollieren ist. Deshalb habe ich auf dem Power-Board und auf
dem Display-Board je zwei I2C-Expander PCF8574(A) eingesetzt, die langsamere
Ein-/Ausgabeoperationen übernehmen. Zusätzlich ist auf dem Display-Board
Platz für ein EEPROM, wo ihr große Datenmengen (z.B. Bilder für das
graphische Display) ablegen könnt.
Bitte achtet darauf, dass eure eigenen Erweiterungen am I2C-Bus nicht dieselben
I2C-Geräteadressen verwenden!
Wie sieht denn so ein Power-Board mit ATMega32 überhaupt aus?
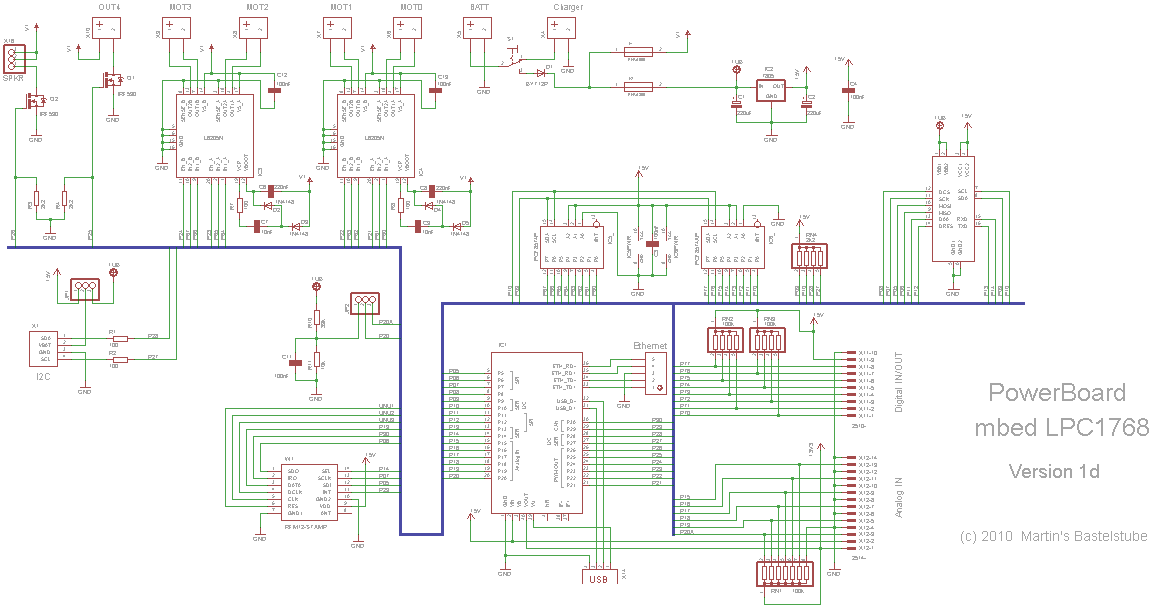
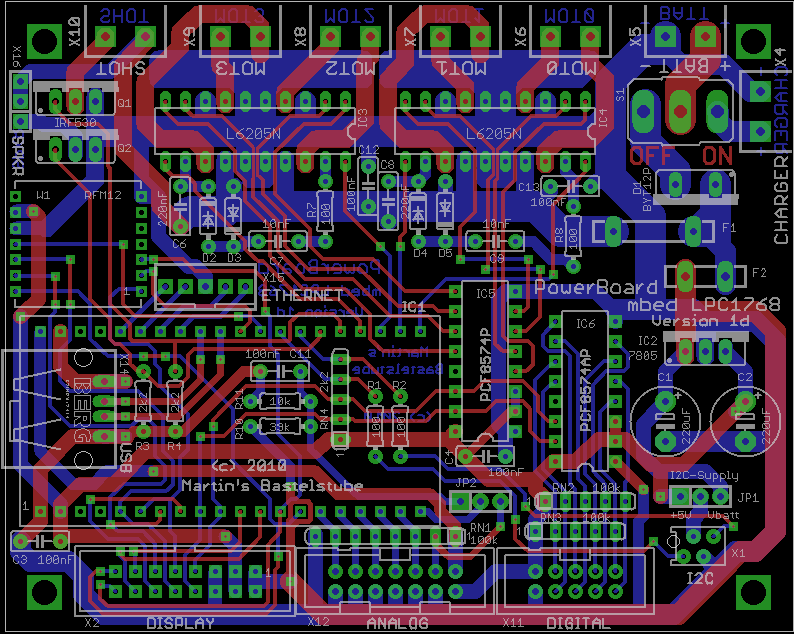
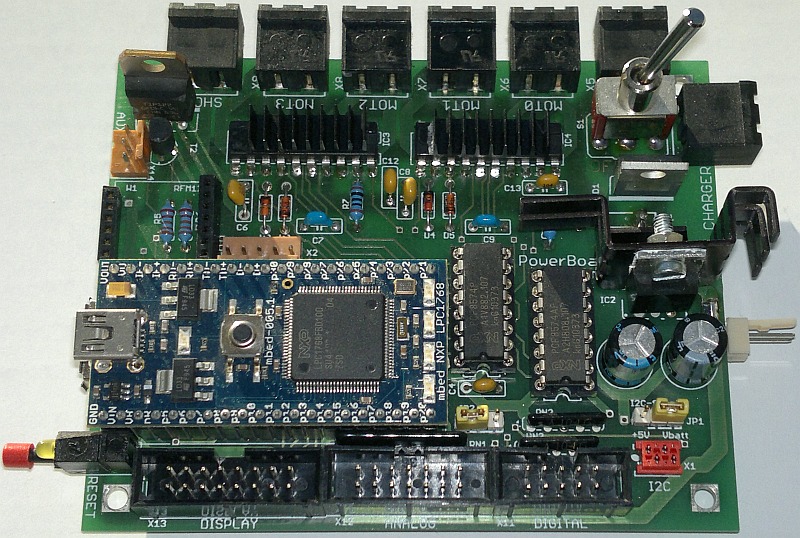
Power-Board mit mbed LPC1768, Version 1:
 Dieses Power-Board hat den leistungsfähigsten Rechner von allen. Das mbed-Modul
beherbergt einen ARM
Cortex-M3,
das ist ein schneller 32-bit-Controller. Er wird mit 100 MHz getaktet,
das ergibt mindestens die 8-fache Rechengeschwindigkeit
gegenüber einem ATMega32.
Der mbed hat zwei getrennte I2C-Schnittstellen, so dass die auf dem Power-Board und
dem Display-Board verwendeten I2C-Chips keine I2C-Geräteadressen belegen, die
ihr sonst auf dem Roboter brauchen würdet.
Auf dem Power-Board ist Platz für ein Funkmodul RFM12. Damit kann man auch vom
fahrenden Roboter aus Informationen an einen außen stehenden Rechner senden
– zum Beispiel, um die Sensormesswerte und die Entscheidungen der Software
auf dem Roboter mitverfolgen zu können. Das hilft unheimlich bei der
Fehlersuche.
Dieses Power-Board hat den leistungsfähigsten Rechner von allen. Das mbed-Modul
beherbergt einen ARM
Cortex-M3,
das ist ein schneller 32-bit-Controller. Er wird mit 100 MHz getaktet,
das ergibt mindestens die 8-fache Rechengeschwindigkeit
gegenüber einem ATMega32.
Der mbed hat zwei getrennte I2C-Schnittstellen, so dass die auf dem Power-Board und
dem Display-Board verwendeten I2C-Chips keine I2C-Geräteadressen belegen, die
ihr sonst auf dem Roboter brauchen würdet.
Auf dem Power-Board ist Platz für ein Funkmodul RFM12. Damit kann man auch vom
fahrenden Roboter aus Informationen an einen außen stehenden Rechner senden
– zum Beispiel, um die Sensormesswerte und die Entscheidungen der Software
auf dem Roboter mitverfolgen zu können. Das hilft unheimlich bei der
Fehlersuche.
Leider ist der Einsatz dieser Funkmodule im RoboCup-Wettbewerb nicht erlaubt.
Aber bei der Vorbereitung eures Roboters auf den Wettkampf könnt ihr es
gerne nutzen.
Außerdem bringt der mbed noch eine USB-Master-Schnittstelle und sogar Ethernet mit!
Wer das sinnvoll einzusetzen weiß, kann vielleicht eine USB-Kamera abfragen und
die Ergebnisse übers Netzwerk an Andere weiterleiten.
Einen Nachteil hat der mbed tatsächlich: Der Compiler für eure Software ist nur
online im Internet bei mbed.com zu erreichen.
Wenn ihr beim RoboCup keine Internet-Verbindung habt, könnt ihr das Programm in
eurem Roboter nicht mehr weiterentwickeln.
Dafür ist die Programmierung aber erstaunlich einfach – man kann schnell
ein lauffähiges Programm zusammenstellen.
Das Power-Board mit mbed1768 ist der Bordrechner für meine beiden Roboter, die als
PowerBoys
in der "Open 4 All"-Liga beim RoboCup Junior 2012 in Vöhringen
mitgespielt haben.
Wie sieht denn so ein Power-Board mit mbed1768 überhaupt aus?
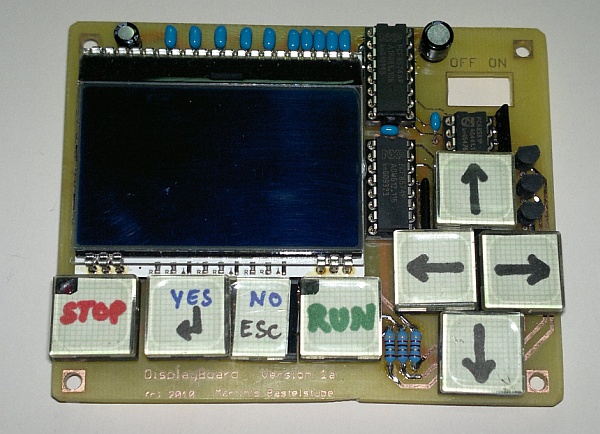
Display-Board mit graphischer LCD-Anzeige, Version 1:
 Dieses Board bietet neben der Anzeige Platz für 8 Tasten oder 4 Tasten +
1 Drehschalter. Zwei Tasten können mit LEDs versehen werden.
Die Hintergrundbeleuchtung des Displays kann geschaltet werden. Bei Reichelt gibt es
sogar ein Beleuchtungs-Modul mit drei verschiedenen LED-Farben, damit kann das
Display in 7 verschiedenen Farben hinterleuchtet werden.
Damit man den Hauptschalter des Power-Boards weiterhin erreichen kann, hat das Display-Board
an der rechten hinteren Ecke eine rechteckige Aussparung für den Schalthebel.
Wie sieht denn so ein Display-Board überhaupt aus?
Dieses Board bietet neben der Anzeige Platz für 8 Tasten oder 4 Tasten +
1 Drehschalter. Zwei Tasten können mit LEDs versehen werden.
Die Hintergrundbeleuchtung des Displays kann geschaltet werden. Bei Reichelt gibt es
sogar ein Beleuchtungs-Modul mit drei verschiedenen LED-Farben, damit kann das
Display in 7 verschiedenen Farben hinterleuchtet werden.
Damit man den Hauptschalter des Power-Boards weiterhin erreichen kann, hat das Display-Board
an der rechten hinteren Ecke eine rechteckige Aussparung für den Schalthebel.
Wie sieht denn so ein Display-Board überhaupt aus?
 Display-Board mit graphischer LCD-Anzeige, Version 2:
Dieses Board bietet neben der Anzeige Platz für 4 Tasten und eine 5-Wege-Cursortaste.
Zwei Tasten können mit LEDs versehen werden.
Display-Board mit graphischer LCD-Anzeige, Version 2:
Dieses Board bietet neben der Anzeige Platz für 4 Tasten und eine 5-Wege-Cursortaste.
Zwei Tasten können mit LEDs versehen werden.
Im Vergleich zur Version 1 gibt es also nicht mehr die Möglichkeit, an Stelle
der Cursortaste 4 einzelne Richtungstasten einzubauen.
Der frei gewordene Platz wird gebraucht für ein digitales Kompassmodul mit
einem Kranz aus 8 LEDs, so wie er in
Martin's Bastelstube, Teil X
beschrieben wird.
Die meisten ICs habe ich unter die LCD-Anzeige gesetzt. Am besten werden sie ohne
Fassung bestückt, damit das Display auch ohne "Aufbocken" darüber passt.
Damit man den Hauptschalter des Power-Boards weiterhin erreichen kann, hat das Display-Board
an der rechten hinteren Ecke eine rechteckige Aussparung für den Schalthebel.
Wie sieht denn so ein Display-Board überhaupt aus?
Display-Board mit graphischer LCD-Anzeige, Version 3:
Dieses Board wird eine Touch-Folie auf dem Display bieten. Das macht die Bedienung
wesentlich einfacher – wenn ihr das Programm eures Roboters ordentlich an die
neuen Möglichkeiten angepasst habt.
Das gleiche Konzept mit Touchscreen funktioniert schon beim Display-Board für Raspberry Pi
in Martin's Bastelstube, Teil XX.
Tschüß, euer Martin S.
|
E-mail:
Diese E-Mail-Adresse ist vor Spambots geschützt! Zur Anzeige muss JavaScript eingeschaltet sein!





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}