



Martin's Bastelstube: Selbstbau-MotorIm RCX-Bastelkasten ("Robotics Invention System") gibt es nur zwei Motoren, und oft muss man noch weitere Funktionen antreiben (z.B. einen Dribbler). Einzelne LEGO-Motoren sind sehr teuer. Kann man sich nicht selbst einen bauen? Na klar kann man das. Man muss nur ein paar Einzelheiten beachten.
 Gut geeignet für die LEGO-Welt sind zum Beispiel alte Antriebsmotoren aus Cassettenrecordern.
Die Betriebsspannung des Motors ist meistens (bei tragbaren Cassettenrecordern) die Spannung
aus allen Batterien, die man hinten einlegen muss. 8 Batterien à 1,5 Volt ergeben 12 Volt
– das ist ein guter Wert für Basteleien am RCX.
Gut geeignet für die LEGO-Welt sind zum Beispiel alte Antriebsmotoren aus Cassettenrecordern.
Die Betriebsspannung des Motors ist meistens (bei tragbaren Cassettenrecordern) die Spannung
aus allen Batterien, die man hinten einlegen muss. 8 Batterien à 1,5 Volt ergeben 12 Volt
– das ist ein guter Wert für Basteleien am RCX.Meistens haben Antriebsmotoren im Cassettenrecorder einen Fliehkraftreger eingebaut. Der soll verhindern, dass der Motor zu schnell dreht. Falls euer Motor deshalb zu sehr an Kraft verliert, kann man den Fliehkraftregler auch überbrücken. Dazu muss man allerdings das Motorgehäuse öffnen. Nur für geübte Bastler! 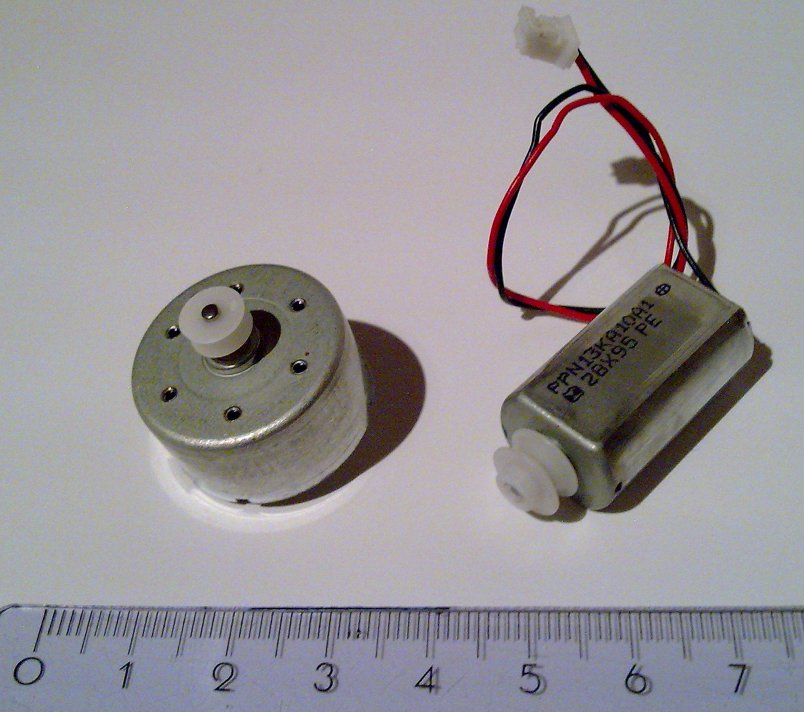 Cassettenrecordermotoren haben eine Riemenscheibe an der Antriebswelle. Die kann man im
einfachsten Fall weiterbenutzen und mit Gummiringen die LEGO-Modelle antreiben. Wenn ihr
unbedingt ein LEGO-Zahnrad anbringen wollt, müsst ihr darauf achten, dass es genau zentriert
auf der Welle sitzt und nicht "eiert".
Wer einen kleineren Motor sucht, findet in ausgedienten CD-Laufwerken auch schöne kleine Modelle,
die meistens schon mit 5 Volt Betriebsspannung zufrieden sind. Das ist etwas wenig für den Betrieb
am RCX, aber für andere Robotik-Plattformen (z.B. das Gold-Board) gerade richtig.
Der kleinere Motor im Foto links hat sogar schon ein passendes Anschlusskabel für die
QFIX-Boards angebaut.
Cassettenrecordermotoren haben eine Riemenscheibe an der Antriebswelle. Die kann man im
einfachsten Fall weiterbenutzen und mit Gummiringen die LEGO-Modelle antreiben. Wenn ihr
unbedingt ein LEGO-Zahnrad anbringen wollt, müsst ihr darauf achten, dass es genau zentriert
auf der Welle sitzt und nicht "eiert".
Wer einen kleineren Motor sucht, findet in ausgedienten CD-Laufwerken auch schöne kleine Modelle,
die meistens schon mit 5 Volt Betriebsspannung zufrieden sind. Das ist etwas wenig für den Betrieb
am RCX, aber für andere Robotik-Plattformen (z.B. das Gold-Board) gerade richtig.
Der kleinere Motor im Foto links hat sogar schon ein passendes Anschlusskabel für die
QFIX-Boards angebaut.
 Jetzt müssen wir uns noch um die mechanische Verbindung des Motors mit der LEGO-Welt kümmern.
Wir suchen uns am besten einen großen, flachen LEGO-Stein (ich habe auch hier wieder ein
Seitenwand-Modul der LEGO-Ritterburg genommen, wie in
Martin's Bastelstube, Teil III).
Wir bohren die Löcher für die Welle und die Montageschrauben in den LEGO-Stein. Als
Schablone zum Anzeichnen der Löcher kann zum Beispiel die original-Montageplatte aus
dem Cassettenrecorder dienen. Auch die Schrauben aus dem Cassettenrecorder können wir
wiederverwenden.
Für die elektrische Verbindung nehmen wir eine Kontaktplatte oder ein halbes LEGO-Anschlusskabel
(siehe Martin's Bastelstube, Teil I).
Jetzt müssen wir uns noch um die mechanische Verbindung des Motors mit der LEGO-Welt kümmern.
Wir suchen uns am besten einen großen, flachen LEGO-Stein (ich habe auch hier wieder ein
Seitenwand-Modul der LEGO-Ritterburg genommen, wie in
Martin's Bastelstube, Teil III).
Wir bohren die Löcher für die Welle und die Montageschrauben in den LEGO-Stein. Als
Schablone zum Anzeichnen der Löcher kann zum Beispiel die original-Montageplatte aus
dem Cassettenrecorder dienen. Auch die Schrauben aus dem Cassettenrecorder können wir
wiederverwenden.
Für die elektrische Verbindung nehmen wir eine Kontaktplatte oder ein halbes LEGO-Anschlusskabel
(siehe Martin's Bastelstube, Teil I). Das Kabel soll so angebracht werden, dass es nicht sofort abreißen kann, wenn mal jemand
daran zieht (das nennt man "Zugentlastung") und dass die Kupferadern im Kabel nicht brechen,
wenn man es zur Seite biegt (das nennt man "Knickschutz"). Auf keinen Fall sollen die
Zug- und Biegekräfte direkt auf die Lötstellen am Motor wirken!
Das Kabel soll so angebracht werden, dass es nicht sofort abreißen kann, wenn mal jemand
daran zieht (das nennt man "Zugentlastung") und dass die Kupferadern im Kabel nicht brechen,
wenn man es zur Seite biegt (das nennt man "Knickschutz"). Auf keinen Fall sollen die
Zug- und Biegekräfte direkt auf die Lötstellen am Motor wirken!Diese Regel gilt übrigens ganz allgemein für alle Anschlüsse auf euren Robotern. Das war schon alles, jetzt können wir den Motor einsetzen. Tschüß, euer Martin S. |
E-mail: Diese E-Mail-Adresse ist vor Spambots geschützt! Zur Anzeige muss JavaScript eingeschaltet sein!